# SG-SLAM
SLAM是智能移动机器人在未知环境中进行状态估计的基本能力之一。然而,大多数视觉SLAM系统**依赖于静态场景的假设**,因此在动态场景中的准确性和鲁棒性严重下降。此外,许多系统构建的度量图**缺乏语义信息**,因此机器人无法在人类的认知水平上理解他们的周围环境。
SG-SLAM是一个基于[ORB-SLAM2](https://github.com/raulmur/ORB_SLAM2)框架的实时RGB-D语义视觉SLAM系统。首先,SG-SLAM增加了两个新的并行线程:一个获取2D语义信息的对象检测线程和一个语义建图线程。然后,在跟踪线程中加入了一个融合语义和几何信息的**快速动态特征剔除算法**。最后,在语义建图线程中生成3D点云和3D语义对象后,它们被发布到ROS系统中进行可视化。
在TUM数据集、波恩数据集和OpenLORIS-Scene数据集进行了实验评估,结果表明SG-SLAM不仅是动态场景中非常实时、准确、鲁棒的系统之一,而且还可以创建直观的语义对象度量地图。
【哔哩哔哩】[系统功能演示视频](https://www.bilibili.com/video/BV1nm4y1y7Ar)
【Youtube】[系统功能演示视频](https://youtu.be/16w_4NRFCdY)
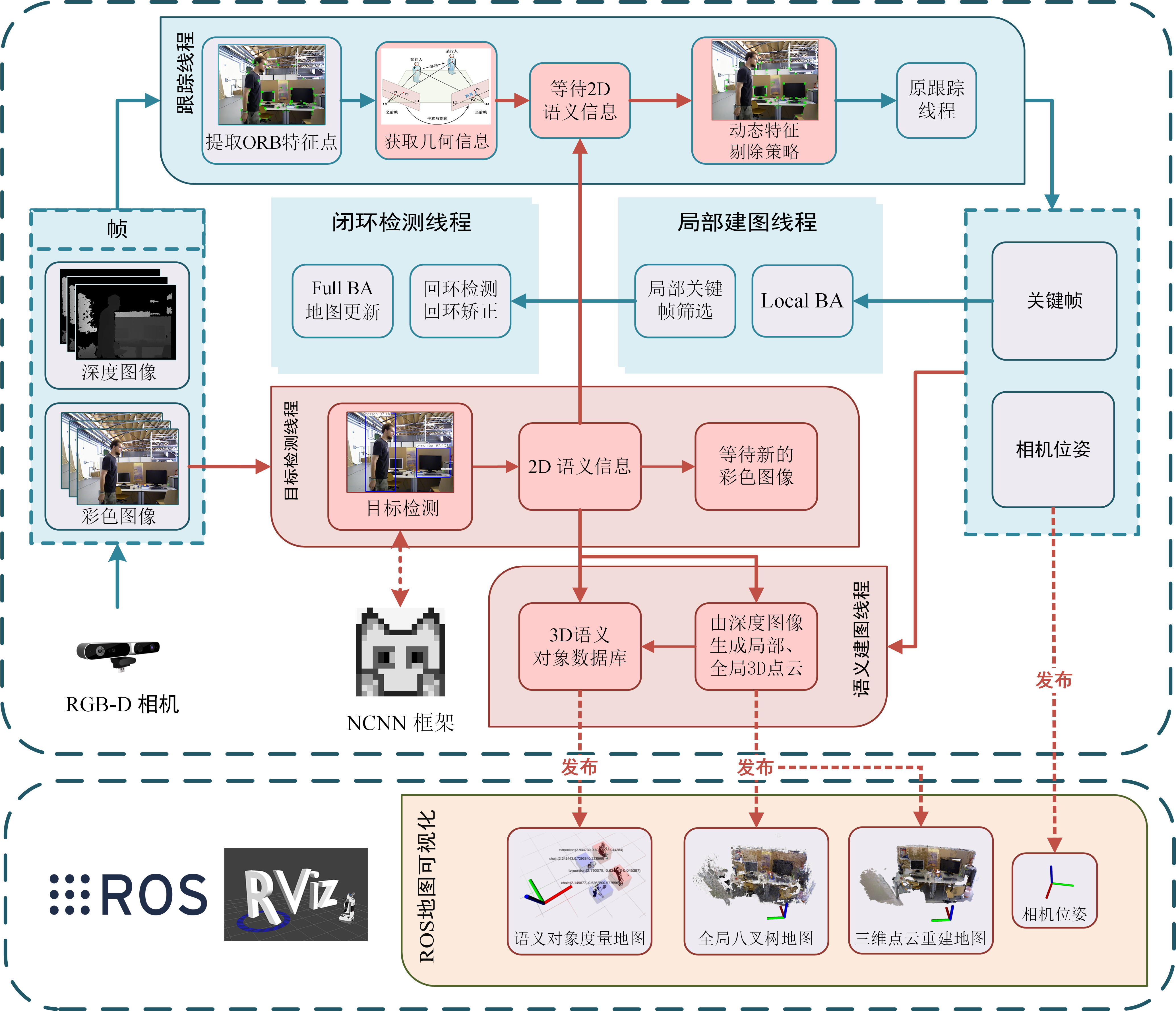
**图1**. SG-SLAM系统框架。ORB-SLAM2的原始框架以水绿色背景呈现,新(或修改的)功能以红色背景呈现。
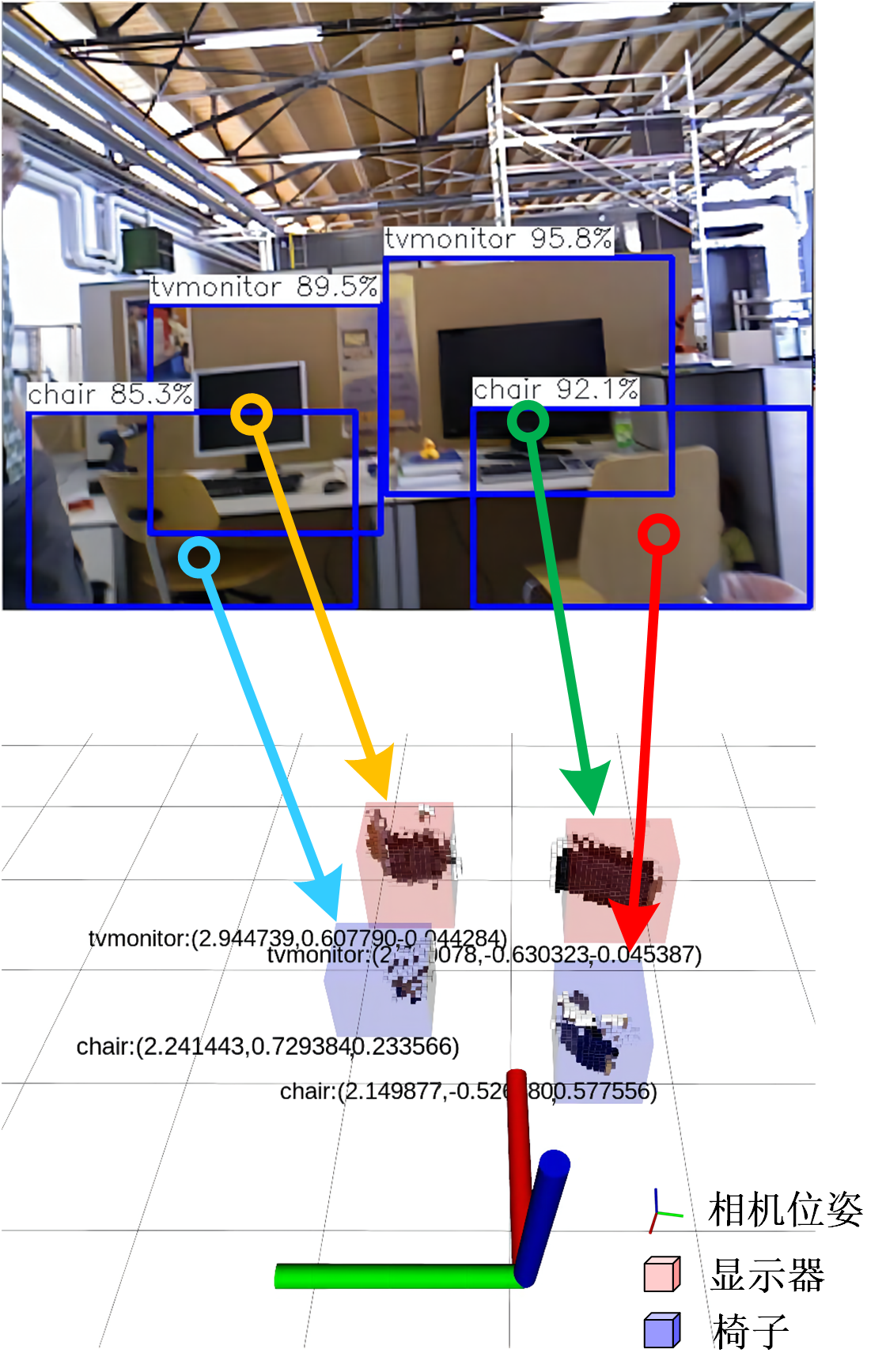 **图2**. tum rgbd dataset fr3/walking_xyz 序列的语义对象度量地图
**图2**. tum rgbd dataset fr3/walking_xyz 序列的语义对象度量地图
 **图3**. tum rgbd dataset fr3/long office household 序列的八叉树地图
**图3**. tum rgbd dataset fr3/long office household 序列的八叉树地图
 **图**4. 实际运行效果图
**系统特点 :**
- 基于ORB-SLAM2, NCNN, ROS, etc.
- 实时 (如果NCNN配置好GPU CUDA加速的话)
- 较其他同类工作(可能更)容易配置和部署
- ...
## 1. License
SG-SLAM 基于协议 [GPLv3 license](https://github.com/silencht/SG-SLAM/blob/main/LICENSE).
论文可在此处下载(或本仓库doc) [IEEE Xplore](https://ieeexplore.ieee.org/abstract/document/9978699/).
如果是学术使用, 请引用(BibTex):
```
@ARTICLE{9978699,
author={Cheng, Shuhong and Sun, Changhe and Zhang, Shijun and Zhang, Dianfan},
journal={IEEE Transactions on Instrumentation and Measurement},
title={SG-SLAM: A Real-Time RGB-D Visual SLAM Toward Dynamic Scenes With Semantic and Geometric Information},
year={2023},
volume={72},
number={},
pages={1-12},
doi={10.1109/TIM.2022.3228006}}
```
## 2. 编译配置 SG-SLAM
```bash
#最基本的
sudo apt-get update
sudo apt install git
sudo apt install cmake
sudo apt install build-essential
sudo apt vim
#test
git --version
gcc --version
g++ --version
cmake --version
#Pangolin
sudo apt install libglew-dev
sudo apt install libboost-dev libboost-thread-dev libboost-filesystem-dev
sudo apt install libpython2.7-dev
git clone https://github.com/stevenlovegrove/Pangolin.git
cd Pangolin/
git checkout v0.5
mkdir build
cd build
cmake ..
make -j4
sudo make install
#OpenCV,可参考https://docs.opencv.org/3.4.15/d7/d9f/tutorial_linux_install.html
sudo apt install libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev
sudo apt install python-dev python-numpy libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libjasper-dev libdc1394-22-dev
git clone https://github.com/opencv/opencv.git
cd opencv/
git checkout 3.4.15
mkdir build
cd build
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local ..
sudo make install
#test
pkg-config opencv --modversion
#Eigen
git clone https://gitlab.com/libeigen/eigen.git
cd eigen/
git checkout 3.1.0
mkdir build
cd build
cmake ..
sudo make install
#test
cat /usr/local/include/eigen3/Eigen/src/Core/util/Macros.h
#Compile orb-slam2 with build.sh,and now orbslam2 can perform well
#ROS
#中国大陆可换源,resource(http://wiki.ros.org/ROS/Installation/UbuntuMirrors)
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
#Set up keys
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo apt update
#this ros below is for ubuntu 18.04
sudo apt install ros-melodic-desktop-full
#环境变量配置
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
#依赖安装
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
#初始化rosdep.遇到错误可参考该文章,https://zhuanlan.zhihu.com/p/397966333
sudo apt install python-rosdep
sudo rosdep init
rosdep update
#test
roscore
#PCL,and pcl-tools(可选)
sudo apt install libpcl-dev pcl-tools
#Octomap,and octovis(可选)
sudo apt install liboctomap-dev octovis
sudo apt install ros-melodic-octomap ros-melodic-octomap-mapping ros-melodic-octomap-msgs ros-melodic-octomap-ros ros-melodic-octomap-rviz-plugins
#SG-SLAM
git clone https://github.com/silencht/SG-SLAM
#编译第三方库:DBoW2、g2o、ncnn
cd SG-SLAM/src/sg-slam/
./ThirdpartyBuild.sh
#如何完整编译安装ncnn? 请参考ncnn仓库的README中的HowTo (https://github.com/Tencent/ncnn/README.md)
#安装完英伟达显卡驱动,vulkan and etc., 编译并安装ncnn
#如果出现编译错误,-DNCNN_DISABLE_RTTI=OFF (https://github.com/Tencent/ncnn/issues/2665)
cd SG-SLAM/src/sg-slam/Thirdparty/ncnn/
mkdir build
cd build
cmake -DCMAKE_TOOLCHAIN_FILE=../toolchains/host.gcc.toolchain.cmake -DNCNN_DISABLE_RTTI=OFF ..
#j后面的数字4可根据自己的CPU线程相应变大,进而提高编译速度
make -j4
sudo make install
#修改 SG-SLAM/src/sg-slam/CMakeLists.txt 中的路径,将该路径设置为你自己系统中的ncnn路径,提醒:该路径下包含ncnnConfig.cmake文件
#set(ncnn_DIR "there,replace with your path/SG-SLAM/src/sg-slam/Thirdparty/ncnn/build/install/lib/cmake/ncnn" CACHE PATH "Directory that contains ncnnConfig.cmake")
#初始化 ROS 工作空间然后依次编译各个功能包
#第一个包功能是将自己相机输出的ROS和OpenCV的话题消息格式转换
#第二个包功能是提供一系列图像几何处理方法
#第三个包功能是负责接收sg-slam发布的3D点云,将之转化为八叉树地图
#第四个包是SG-SLAM系统代码
cd SG-SLAM/src
catkin_init_workspace
cd ..
catkin_make --pkg cv_bridge
catkin_make --pkg image_geometry
catkin_make --pkg octomap_server
catkin_make --pkg sg-slam
```
## 3. 运行 SG-SLAM
将 [TUM dataset](https://vision.in.tum.de/data/datasets/rgbd-dataset/download) 数据集下载完成后放入home目录下的Music路径(该路径与 **run_tum_walking_xyz.sh** 文件调用路径一致,也可根据个人喜好随意设置。
```bash
#Runing SG-SLAM
#terminal 1
roscore
#terminal 2 移动到octomap_server功能包下的launch目录下,该目录下有两个launch文件(octomap.launch,transform.launch),运行之。八叉树建图的各功能参数可在此配置
cd your_sg-slam_path/src/octomap_server/launch
roslaunch octomap.launch
#terminal 3,你可以使用我的rviz配置文件(如下命令),它的路径位于your_sg-slam_path/src/sg-slam/Examples/rvizconfig.rviz,这将直接在打开的rviz中订阅一些地图主题。当然,也可以直接打开rviz,然后手动订阅相关话题。
rviz -d your_sg-slam_path/src/sg-slam/Examples/rvizconfig.rviz
#terminal 4,运行tum数据集的walking_xyz序列。另外,也可运行硬件相机,如文件run_astra_pro_camera.sh
cd your_sg-slam_path/src/sg-slam/
./run_tum_walking_xyz.sh
```
## 4. 参考过的仓库
**包括但不限于以下仓库 (排列顺序无意义) : **
- https://github.com/raulmur/ORB_SLAM2
- https://github.com/ivipsourcecode/DS-SLAM
- https://github.com/Ewenwan/ORB_SLAM2_SSD_Semantic
- https://github.com/MRwangmaomao/semantic_slam_nav_ros
- https://github.com/gaoxiang12/ORBSLAM2_with_pointcloud_map
- https://github.com/abhineet123/ORB_SLAM2
- https://github.com/floatlazer/semantic_slam
- https://github.com/bijustin/YOLO-DynaSLAM
- https://github.com/bijustin/Fast-Dynamic-ORB-SLAM
- https://github.com/halajun/VDO_SLAM
- https://github.com/Quitino/IndoorMapping
- https://github.com/ninedayhx/orb_slam2_ros_dense_map
- https://github.com/lturing/ORB_SLAM3_ROS
- https://github.com/IATBOMSW/ORB-SLAM2_DENSE
- https://github.com/xiaobainixi/ORB-SLAM2_RGBD_DENSE_MAP
- https://github.com/laavanyebahl/3D-Object-Detection-with-Point-Clouds
- ...
## 5. 其他
### 5.1 octomap_server节点
/SG-SLAM/src/octomap_server/launch/octomap.launch
该文件用于启动 octomap_server 节点并配置一些参数。 你可以在这里看到这些参数的含义(http://wiki.ros.org/octomap_server、https://octomap.github.io/)
其中,**param name="resolution"**参数表示octomap的体素分辨率。 参数越小,地图体素分割越精细,分辨率越高。 但是处理时间和计算复杂度也增加了。
**occupancy_min_z** 和 **occupancy_max_z** 参数可以选择性通过z轴范围内的点云。 如果您的相机初始视图与地面平行,您还可以使用 occupancy_min_z 参数来过滤掉地面(一个小的诡计)。 同样,occupancy_min_z 参数可用于过滤出房屋的顶部体素。
**filter_ground**是过滤掉地面的正常算法(不是直接使用occupancy_min_z过滤掉地面的技巧)。 用法可以参考上面的网址。 当然,现在是关闭的。
```xml
```
### 5.2 相机参数yaml文件
SG-SLAM/src/sg-slam/Examples/astra_pro_camera.yaml
SG-SLAM/src/sg-slam/Examples/TUM1.yaml
……
相机配置参数文件新增了以下参数项,后面依次介绍这些参数的作用。
```yaml
PointCloudMapping.is_map_construction_consider_dynamic: 0
PointCloudMapping.camera_valid_depth_Min: 0.5
PointCloudMapping.camera_valid_depth_Max: 5.0
PointCloudMapping.is_octo_semantic_map_construction: 0
PointCloudMapping.Sor_Local_MeanK: 50
PointCloudMapping.Sor_Local_StddevMulThresh: 2.0
PointCloudMapping.Voxel_Local_LeafSize: 0.01
PointCloudMapping.is_global_pc_reconstruction: 1
PointCloudMapping.Sor_Global_MeanK: 50
PointCloudMapping.Sor_Global_StddevMulThresh: 2.0
PointCloudMapping.Voxel_Global_LeafSize: 0.01
Detector3D.Sor_MeanK: 50
Detector3D.Sor_StddevMulThresh: 1.0
Detector3D.Voxel_LeafSize: 0.01
Detector3D.EuclideanClusterTolerance: 0.02
Detector3D.EuclideanClusterMinSize: 1000
Detector3D.EuclideanClusterMaxSize: 30000
Detector3D.DetectSimilarCompareRatio: 0.1
Detector3D.global_pc_update_kf_threshold: 30
Detector2D.detection_confidence_threshold: 0.985
Detector2D.dynamic_detection_confidence_threshold: 0.1
```
- PointCloudMapping.is_map_construction_consider_dynamic
进行octomap或三维点云地图构建时,地图中的动态对象会影响地图构建的质量。当此参数设置为1时,地图构建时将尽可能剔除动态对象(代码实现是剔除行人),即不对动态对象进行建图。如果场景中不存在动态对象类别,可将此参数设置为0。
- PointCloudMapping.camera_valid_depth_Min and PointCloudMapping.camera_valid_depth_Max
RGB-D深度相机因硬件、原理等限制,深度图像的数据存在有效的观测范围限制。这两个参数用来限制深度图像的有效数值范围。可根据相机型号进行调节,此处默认有效范围为0.5米到5米。
- PointCloudMapping.is_octo_semantic_map_construction
是否构建octomap和语义对象度量地图,1代表构建,0是不构建
- PointCloudMapping.Sor_Local_MeanK,PointCloudMapping.Sor_Local_StddevMulThresh and PointCloudMapping.Voxel_Local_LeafSize
如果is_octo_semantic_map_construction设置为1,即构建octomap。这三个参数的作用是对单帧深度图像转换得到的三维点云进行滤波的滤波器设置参数。
以Voxel_Local_LeafSize为例,从System.cc读取yaml配置文件时的代码可以看出,这个参数最终传递给了**PointCloudMapping**类中的Voxel滤镜对象构造函数。这个参数最后传给了**voxel filter object**,也就是深度图转化为3D点云后,对点云进行体素过滤所使用的分辨率。 因为深度图直接转换出来的3D点云数量非常多(640*480),计算负担大,所以需要进行过滤。 voxel filter的分辨率和octomap类似,就是用体素中所有点的重心来近似显示体素中其他点,从而减少计算量。
经过我的测试,在我的设备上一般设置为0.01,计算效率和效果达到了很好的平衡。 可针对个人硬件的不同对参数进行调整。
- PointCloudMapping.is_global_pc_reconstruction
是否进行三维点云地图重建,1是进行,0是不进行。由于地图构建需要不小的计算成本,因此一般建议此参数和PointCloudMapping.is_octo_semantic_map_construction参数不要同时开启。
- PointCloudMapping.Sor_Global_MeanK, PointCloudMapping.Sor_Global_StddevMulThresh and PointCloudMapping.Voxel_Global_LeafSize
这些参数的作用类似于PointCloudMapping.Sor_Local_MeanK等参数。
- Detector3D.Sor_MeanK, Detector3D.Sor_StddevMulThresh and Detector3D.Voxel_LeafSize
这些参数的作用类似PointCloudMapping.Sor_Local_MeanK等参数。它们是获取3D语义对象时,对检测框内的点云团进行滤波处理的参数。下面的欧式聚类设置参数也是为了尽可能准确的提取目标对象的点云团。
- Detector3D.EuclideanClusterTolerance, Detector3D.EuclideanClusterMinSize, Detector3D.EuclideanClusterMaxSize
对对象检测框内的点云进行欧式聚类分割的设置参数。作用是为了尽可能准确的在检测框内的点云团中分割出目标对象的点云团。
- Detector3D.DetectSimilarCompareRatio
求点云团与其目标对象的相似匹配度时,进行筛选的比例参数。作用类似于ORB-SLAM2中进行Bow词袋匹配时的mfNNratio变量。此值越小,筛选就越严格。
- Detector3D.global_pc_update_kf_threshold
实时进行全局三维点云地图滤波和发布等功能十分消耗算力,因此平时只是处理每帧点云并添加到全局地图。只有在系统空闲(缓冲队列中没有新的关键帧)或处理的关键帧数量超过当前阈值参数时才会进行全局点云滤波和发布操作。
- Detector2D.detection_confidence_threshold
检测普通对象时的置信度阈值,只有检测结果高于该阈值时,才认为检测结果可信。该阈值设置过低可能会造成语义对象度量地图检测到错误的目标。设置过高,可能会导致难以获取到一些不易辨别的目标。因此需根据环境进行设置。与当前检测模型有很大的关系。
- Detector2D.dynamic_detection_confidence_threshold
检测动态对象时的置信度阈值,只有检测结果高于该阈值时,才认为检测结果可信。此阈值设置较低的原因,是动态对象对系统跟踪和建图造成的负面影响较大。因此需要尽可能相信动态对象的检测结果。
### 5.3 动态特征剔除算法代码
代码位于Frame.cc,主要在第155行的RmDynamicPointWithSemanticAndGeometry函数中
### 5.4 octomap_server 部分地图“消失”问题
对于上个版本octomap建图时,部分八叉树地图会出现“消失”的问题已经解决(重写了点云和tf等信息的话题发布功能代码)。
具体问题描述可参考:
https://answers.ros.org/question/224488/octomap-decreasing-probabilities-when-obstacle-is-not-there-anymore/
https://answers.ros.org/question/51837/octomap_server-globally-referenced-pointcloud-and-transform/
https://zhuanlan.zhihu.com/p/625190273
**图**4. 实际运行效果图
**系统特点 :**
- 基于ORB-SLAM2, NCNN, ROS, etc.
- 实时 (如果NCNN配置好GPU CUDA加速的话)
- 较其他同类工作(可能更)容易配置和部署
- ...
## 1. License
SG-SLAM 基于协议 [GPLv3 license](https://github.com/silencht/SG-SLAM/blob/main/LICENSE).
论文可在此处下载(或本仓库doc) [IEEE Xplore](https://ieeexplore.ieee.org/abstract/document/9978699/).
如果是学术使用, 请引用(BibTex):
```
@ARTICLE{9978699,
author={Cheng, Shuhong and Sun, Changhe and Zhang, Shijun and Zhang, Dianfan},
journal={IEEE Transactions on Instrumentation and Measurement},
title={SG-SLAM: A Real-Time RGB-D Visual SLAM Toward Dynamic Scenes With Semantic and Geometric Information},
year={2023},
volume={72},
number={},
pages={1-12},
doi={10.1109/TIM.2022.3228006}}
```
## 2. 编译配置 SG-SLAM
```bash
#最基本的
sudo apt-get update
sudo apt install git
sudo apt install cmake
sudo apt install build-essential
sudo apt vim
#test
git --version
gcc --version
g++ --version
cmake --version
#Pangolin
sudo apt install libglew-dev
sudo apt install libboost-dev libboost-thread-dev libboost-filesystem-dev
sudo apt install libpython2.7-dev
git clone https://github.com/stevenlovegrove/Pangolin.git
cd Pangolin/
git checkout v0.5
mkdir build
cd build
cmake ..
make -j4
sudo make install
#OpenCV,可参考https://docs.opencv.org/3.4.15/d7/d9f/tutorial_linux_install.html
sudo apt install libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev
sudo apt install python-dev python-numpy libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libjasper-dev libdc1394-22-dev
git clone https://github.com/opencv/opencv.git
cd opencv/
git checkout 3.4.15
mkdir build
cd build
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local ..
sudo make install
#test
pkg-config opencv --modversion
#Eigen
git clone https://gitlab.com/libeigen/eigen.git
cd eigen/
git checkout 3.1.0
mkdir build
cd build
cmake ..
sudo make install
#test
cat /usr/local/include/eigen3/Eigen/src/Core/util/Macros.h
#Compile orb-slam2 with build.sh,and now orbslam2 can perform well
#ROS
#中国大陆可换源,resource(http://wiki.ros.org/ROS/Installation/UbuntuMirrors)
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
#Set up keys
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo apt update
#this ros below is for ubuntu 18.04
sudo apt install ros-melodic-desktop-full
#环境变量配置
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
#依赖安装
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
#初始化rosdep.遇到错误可参考该文章,https://zhuanlan.zhihu.com/p/397966333
sudo apt install python-rosdep
sudo rosdep init
rosdep update
#test
roscore
#PCL,and pcl-tools(可选)
sudo apt install libpcl-dev pcl-tools
#Octomap,and octovis(可选)
sudo apt install liboctomap-dev octovis
sudo apt install ros-melodic-octomap ros-melodic-octomap-mapping ros-melodic-octomap-msgs ros-melodic-octomap-ros ros-melodic-octomap-rviz-plugins
#SG-SLAM
git clone https://github.com/silencht/SG-SLAM
#编译第三方库:DBoW2、g2o、ncnn
cd SG-SLAM/src/sg-slam/
./ThirdpartyBuild.sh
#如何完整编译安装ncnn? 请参考ncnn仓库的README中的HowTo (https://github.com/Tencent/ncnn/README.md)
#安装完英伟达显卡驱动,vulkan and etc., 编译并安装ncnn
#如果出现编译错误,-DNCNN_DISABLE_RTTI=OFF (https://github.com/Tencent/ncnn/issues/2665)
cd SG-SLAM/src/sg-slam/Thirdparty/ncnn/
mkdir build
cd build
cmake -DCMAKE_TOOLCHAIN_FILE=../toolchains/host.gcc.toolchain.cmake -DNCNN_DISABLE_RTTI=OFF ..
#j后面的数字4可根据自己的CPU线程相应变大,进而提高编译速度
make -j4
sudo make install
#修改 SG-SLAM/src/sg-slam/CMakeLists.txt 中的路径,将该路径设置为你自己系统中的ncnn路径,提醒:该路径下包含ncnnConfig.cmake文件
#set(ncnn_DIR "there,replace with your path/SG-SLAM/src/sg-slam/Thirdparty/ncnn/build/install/lib/cmake/ncnn" CACHE PATH "Directory that contains ncnnConfig.cmake")
#初始化 ROS 工作空间然后依次编译各个功能包
#第一个包功能是将自己相机输出的ROS和OpenCV的话题消息格式转换
#第二个包功能是提供一系列图像几何处理方法
#第三个包功能是负责接收sg-slam发布的3D点云,将之转化为八叉树地图
#第四个包是SG-SLAM系统代码
cd SG-SLAM/src
catkin_init_workspace
cd ..
catkin_make --pkg cv_bridge
catkin_make --pkg image_geometry
catkin_make --pkg octomap_server
catkin_make --pkg sg-slam
```
## 3. 运行 SG-SLAM
将 [TUM dataset](https://vision.in.tum.de/data/datasets/rgbd-dataset/download) 数据集下载完成后放入home目录下的Music路径(该路径与 **run_tum_walking_xyz.sh** 文件调用路径一致,也可根据个人喜好随意设置。
```bash
#Runing SG-SLAM
#terminal 1
roscore
#terminal 2 移动到octomap_server功能包下的launch目录下,该目录下有两个launch文件(octomap.launch,transform.launch),运行之。八叉树建图的各功能参数可在此配置
cd your_sg-slam_path/src/octomap_server/launch
roslaunch octomap.launch
#terminal 3,你可以使用我的rviz配置文件(如下命令),它的路径位于your_sg-slam_path/src/sg-slam/Examples/rvizconfig.rviz,这将直接在打开的rviz中订阅一些地图主题。当然,也可以直接打开rviz,然后手动订阅相关话题。
rviz -d your_sg-slam_path/src/sg-slam/Examples/rvizconfig.rviz
#terminal 4,运行tum数据集的walking_xyz序列。另外,也可运行硬件相机,如文件run_astra_pro_camera.sh
cd your_sg-slam_path/src/sg-slam/
./run_tum_walking_xyz.sh
```
## 4. 参考过的仓库
**包括但不限于以下仓库 (排列顺序无意义) : **
- https://github.com/raulmur/ORB_SLAM2
- https://github.com/ivipsourcecode/DS-SLAM
- https://github.com/Ewenwan/ORB_SLAM2_SSD_Semantic
- https://github.com/MRwangmaomao/semantic_slam_nav_ros
- https://github.com/gaoxiang12/ORBSLAM2_with_pointcloud_map
- https://github.com/abhineet123/ORB_SLAM2
- https://github.com/floatlazer/semantic_slam
- https://github.com/bijustin/YOLO-DynaSLAM
- https://github.com/bijustin/Fast-Dynamic-ORB-SLAM
- https://github.com/halajun/VDO_SLAM
- https://github.com/Quitino/IndoorMapping
- https://github.com/ninedayhx/orb_slam2_ros_dense_map
- https://github.com/lturing/ORB_SLAM3_ROS
- https://github.com/IATBOMSW/ORB-SLAM2_DENSE
- https://github.com/xiaobainixi/ORB-SLAM2_RGBD_DENSE_MAP
- https://github.com/laavanyebahl/3D-Object-Detection-with-Point-Clouds
- ...
## 5. 其他
### 5.1 octomap_server节点
/SG-SLAM/src/octomap_server/launch/octomap.launch
该文件用于启动 octomap_server 节点并配置一些参数。 你可以在这里看到这些参数的含义(http://wiki.ros.org/octomap_server、https://octomap.github.io/)
其中,**param name="resolution"**参数表示octomap的体素分辨率。 参数越小,地图体素分割越精细,分辨率越高。 但是处理时间和计算复杂度也增加了。
**occupancy_min_z** 和 **occupancy_max_z** 参数可以选择性通过z轴范围内的点云。 如果您的相机初始视图与地面平行,您还可以使用 occupancy_min_z 参数来过滤掉地面(一个小的诡计)。 同样,occupancy_min_z 参数可用于过滤出房屋的顶部体素。
**filter_ground**是过滤掉地面的正常算法(不是直接使用occupancy_min_z过滤掉地面的技巧)。 用法可以参考上面的网址。 当然,现在是关闭的。
```xml
```
### 5.2 相机参数yaml文件
SG-SLAM/src/sg-slam/Examples/astra_pro_camera.yaml
SG-SLAM/src/sg-slam/Examples/TUM1.yaml
……
相机配置参数文件新增了以下参数项,后面依次介绍这些参数的作用。
```yaml
PointCloudMapping.is_map_construction_consider_dynamic: 0
PointCloudMapping.camera_valid_depth_Min: 0.5
PointCloudMapping.camera_valid_depth_Max: 5.0
PointCloudMapping.is_octo_semantic_map_construction: 0
PointCloudMapping.Sor_Local_MeanK: 50
PointCloudMapping.Sor_Local_StddevMulThresh: 2.0
PointCloudMapping.Voxel_Local_LeafSize: 0.01
PointCloudMapping.is_global_pc_reconstruction: 1
PointCloudMapping.Sor_Global_MeanK: 50
PointCloudMapping.Sor_Global_StddevMulThresh: 2.0
PointCloudMapping.Voxel_Global_LeafSize: 0.01
Detector3D.Sor_MeanK: 50
Detector3D.Sor_StddevMulThresh: 1.0
Detector3D.Voxel_LeafSize: 0.01
Detector3D.EuclideanClusterTolerance: 0.02
Detector3D.EuclideanClusterMinSize: 1000
Detector3D.EuclideanClusterMaxSize: 30000
Detector3D.DetectSimilarCompareRatio: 0.1
Detector3D.global_pc_update_kf_threshold: 30
Detector2D.detection_confidence_threshold: 0.985
Detector2D.dynamic_detection_confidence_threshold: 0.1
```
- PointCloudMapping.is_map_construction_consider_dynamic
进行octomap或三维点云地图构建时,地图中的动态对象会影响地图构建的质量。当此参数设置为1时,地图构建时将尽可能剔除动态对象(代码实现是剔除行人),即不对动态对象进行建图。如果场景中不存在动态对象类别,可将此参数设置为0。
- PointCloudMapping.camera_valid_depth_Min and PointCloudMapping.camera_valid_depth_Max
RGB-D深度相机因硬件、原理等限制,深度图像的数据存在有效的观测范围限制。这两个参数用来限制深度图像的有效数值范围。可根据相机型号进行调节,此处默认有效范围为0.5米到5米。
- PointCloudMapping.is_octo_semantic_map_construction
是否构建octomap和语义对象度量地图,1代表构建,0是不构建
- PointCloudMapping.Sor_Local_MeanK,PointCloudMapping.Sor_Local_StddevMulThresh and PointCloudMapping.Voxel_Local_LeafSize
如果is_octo_semantic_map_construction设置为1,即构建octomap。这三个参数的作用是对单帧深度图像转换得到的三维点云进行滤波的滤波器设置参数。
以Voxel_Local_LeafSize为例,从System.cc读取yaml配置文件时的代码可以看出,这个参数最终传递给了**PointCloudMapping**类中的Voxel滤镜对象构造函数。这个参数最后传给了**voxel filter object**,也就是深度图转化为3D点云后,对点云进行体素过滤所使用的分辨率。 因为深度图直接转换出来的3D点云数量非常多(640*480),计算负担大,所以需要进行过滤。 voxel filter的分辨率和octomap类似,就是用体素中所有点的重心来近似显示体素中其他点,从而减少计算量。
经过我的测试,在我的设备上一般设置为0.01,计算效率和效果达到了很好的平衡。 可针对个人硬件的不同对参数进行调整。
- PointCloudMapping.is_global_pc_reconstruction
是否进行三维点云地图重建,1是进行,0是不进行。由于地图构建需要不小的计算成本,因此一般建议此参数和PointCloudMapping.is_octo_semantic_map_construction参数不要同时开启。
- PointCloudMapping.Sor_Global_MeanK, PointCloudMapping.Sor_Global_StddevMulThresh and PointCloudMapping.Voxel_Global_LeafSize
这些参数的作用类似于PointCloudMapping.Sor_Local_MeanK等参数。
- Detector3D.Sor_MeanK, Detector3D.Sor_StddevMulThresh and Detector3D.Voxel_LeafSize
这些参数的作用类似PointCloudMapping.Sor_Local_MeanK等参数。它们是获取3D语义对象时,对检测框内的点云团进行滤波处理的参数。下面的欧式聚类设置参数也是为了尽可能准确的提取目标对象的点云团。
- Detector3D.EuclideanClusterTolerance, Detector3D.EuclideanClusterMinSize, Detector3D.EuclideanClusterMaxSize
对对象检测框内的点云进行欧式聚类分割的设置参数。作用是为了尽可能准确的在检测框内的点云团中分割出目标对象的点云团。
- Detector3D.DetectSimilarCompareRatio
求点云团与其目标对象的相似匹配度时,进行筛选的比例参数。作用类似于ORB-SLAM2中进行Bow词袋匹配时的mfNNratio变量。此值越小,筛选就越严格。
- Detector3D.global_pc_update_kf_threshold
实时进行全局三维点云地图滤波和发布等功能十分消耗算力,因此平时只是处理每帧点云并添加到全局地图。只有在系统空闲(缓冲队列中没有新的关键帧)或处理的关键帧数量超过当前阈值参数时才会进行全局点云滤波和发布操作。
- Detector2D.detection_confidence_threshold
检测普通对象时的置信度阈值,只有检测结果高于该阈值时,才认为检测结果可信。该阈值设置过低可能会造成语义对象度量地图检测到错误的目标。设置过高,可能会导致难以获取到一些不易辨别的目标。因此需根据环境进行设置。与当前检测模型有很大的关系。
- Detector2D.dynamic_detection_confidence_threshold
检测动态对象时的置信度阈值,只有检测结果高于该阈值时,才认为检测结果可信。此阈值设置较低的原因,是动态对象对系统跟踪和建图造成的负面影响较大。因此需要尽可能相信动态对象的检测结果。
### 5.3 动态特征剔除算法代码
代码位于Frame.cc,主要在第155行的RmDynamicPointWithSemanticAndGeometry函数中
### 5.4 octomap_server 部分地图“消失”问题
对于上个版本octomap建图时,部分八叉树地图会出现“消失”的问题已经解决(重写了点云和tf等信息的话题发布功能代码)。
具体问题描述可参考:
https://answers.ros.org/question/224488/octomap-decreasing-probabilities-when-obstacle-is-not-there-anymore/
https://answers.ros.org/question/51837/octomap_server-globally-referenced-pointcloud-and-transform/
https://zhuanlan.zhihu.com/p/625190273